MOISTVALVE
A Moisture Sensory Soft Valve
Aug 2022 - Oct 2022
Personal project completed at Zhejiang University
Advisor: Guanyun Wang, Jackie Wang
ABSTRACT
This work presents a smart soft pneumatic valve that is water-responsive without the need for hard sensors or computer control. Specifically, the valve uses a human-safe hydrogel that responds to humidity and a “kink” structure. I describe different materials and valve structures tested and iterated. Finally, I show several applications of this design and discuss opportunities for future work.
INTRODUCTION
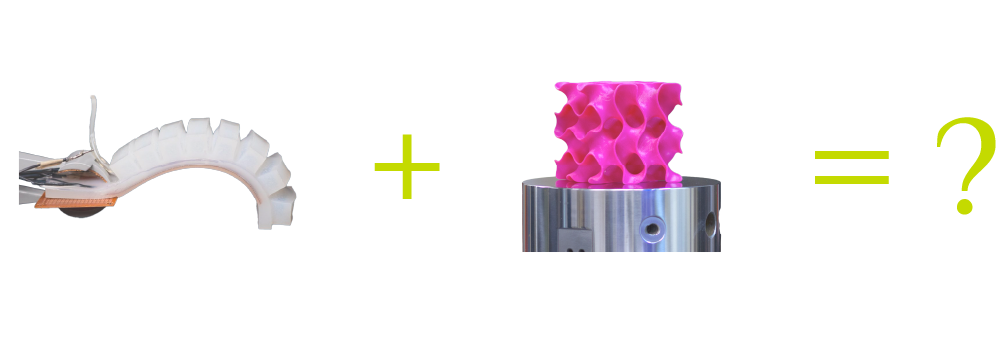
Pneumatics+Responsive materials: 1+1>2 ?
Pneumatic products and robots are very popular these days because they guarantee safer human-computer interaction, features lightweight, resistance to impacts, etc. However, current pneumatic products mainly use silicon gel as its material. Therefore I wonder if there will be sparks when we use smart responsive materials in them.
Design of the MoistValve
With the insight, I designed a smart soft pneumatic valve that can convert the environment humidity degree into logic signal (valve open & close).
RELATED WORKS
Soft Sensors
Traditional rigid sensors are incompatible with soft products. Therefore researchers begin looking for soft substitutes.

Wyss Institute uses microchannels to measure the motion of hands. [1]
research opportunities
current research on soft sensors mainly focuses on the measurement of mechanical variables

current research on soft sensors mainly focuses on the measurement of mechanical variables

Physical Intelligence
Physical intelligence means utilize smartly designed structures and materials to encodes sensing, actuation, control, etc. into the body of an agent. [2]

Researchers designed a pressure valve to control soft robots without chips. [3]

Rotini-like soft robots that can navigate complex environments on their own. [4]
reseearch goal
I chose physical intelligence as the design paradigm: I wanted to develop a smart pneumatic valve as a physical terminal, which could translate the environmental humidity degree into physical signals.
Humidity-Responsive Materials
Following the paradigm of physical intelligence, I start to look for different materials that respond to humidity.

⬅️ BioLogic uses natto cells as humidity-sensitive nanoactuator to create responsive bio-skin. [5]
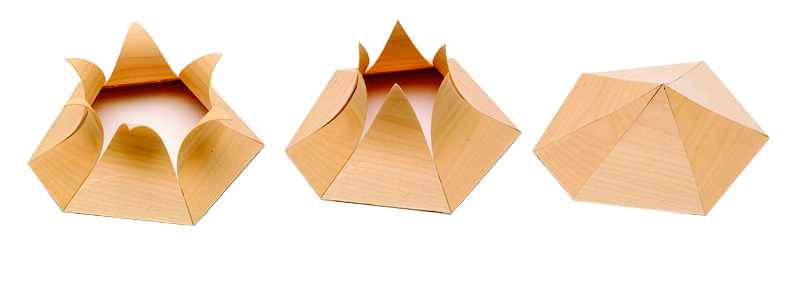
⬆️ physically programmed wood can self-transform based on humidity [6]
material opportunity
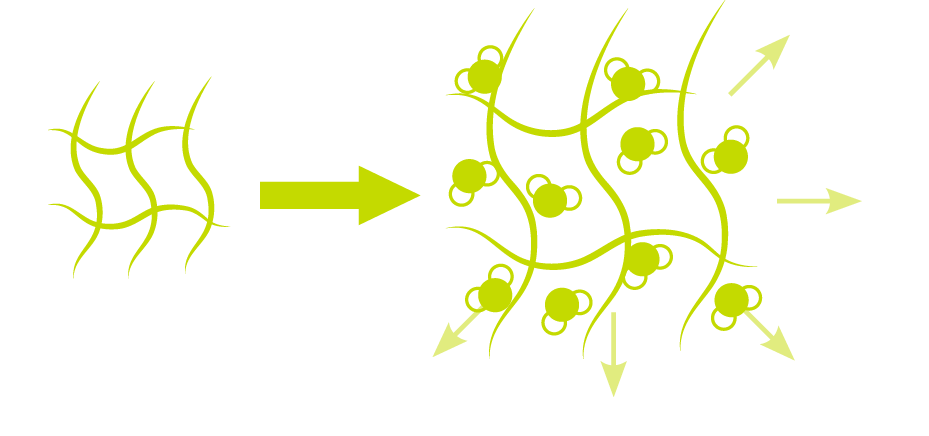
A more promising material in pneumatic context is hydrogels: they are soft and highly water-absorbant.

water-responsive hydrogel-textile composites [7]
Shape-changing Hydrogel Valve Structures
Reversibly deformable hydrogels responsive to various external stimuli such as temperature, light, and PH have been widely applied to the design of valve structures.
research opportunity

temperature [8]

light [9]

PH [10]
➊ Shape-changing hydrogels responsive to various types of external stimuli have been developed, however, humidity has not been considered an external stimulus.

❷ These valve structures have not be implemented for interaction purposes.
Conclusion
The proposed physically intelligent soft pneumatic valve based on responsive hydrogel materials is worth researching because relevant fields haven't been fully researched.
STRUCTURE DESIGN
What Valve Structure to Use?
There are two types of hydrogel valve structures: direct and indirect valves.
option 1: direct valves
Direct valves use the responsive swelling of hydrogels placed directly in the flow to be controlled.
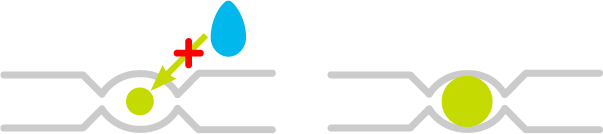
option 2: indirect valves
Hydrogels are not placed directly in the flow, and their swelling triggers structures to restrict the flow.

humidity-responsive hydrogel

unreliable air impermeability
unable to respond to air humidity

reliable air impermeability
able to respond to air humidity
After analysis, I chose the indirect valve structure to continue my design
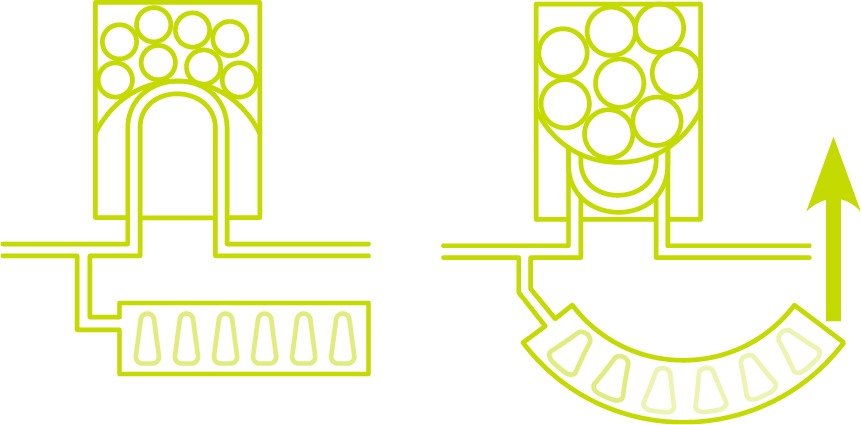
How to Open & Close the Valve?
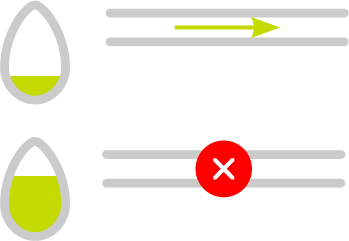
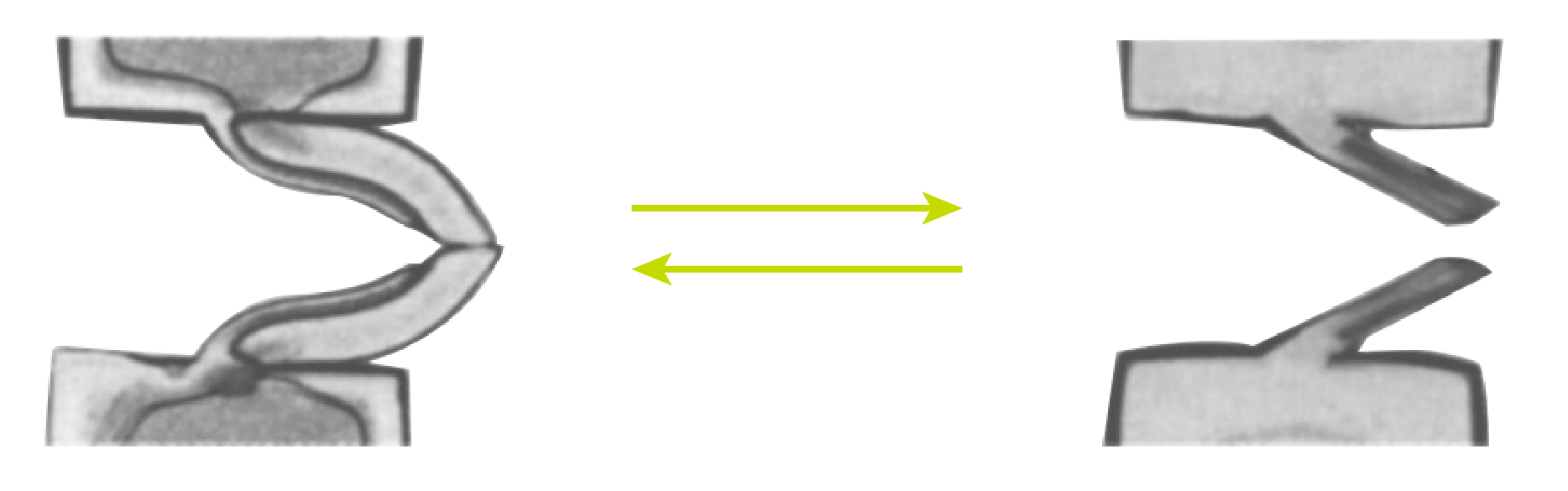
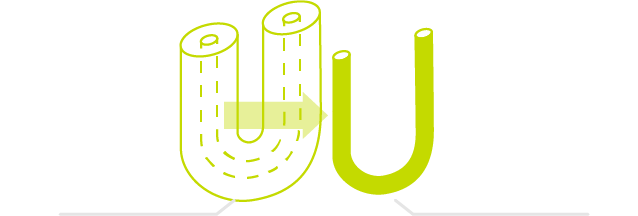
Inspired by a Harvard research[11], I found that the kink valve can be used to switch on and off the flow of air.
I used elastomeric tubes to test different modes and parameters of the kink.

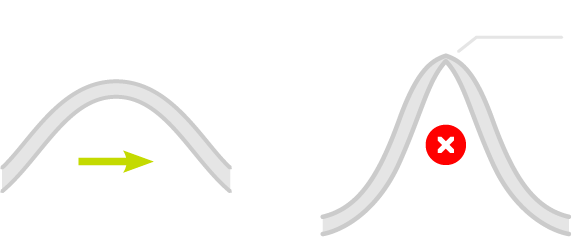
challenge
Using elastomeric tubes will make the open and close of the valve irreversible.
How to Make the Kink Valve Reversible?
First we need to identify why the kink formation is irreversible for elastomeric tubes.
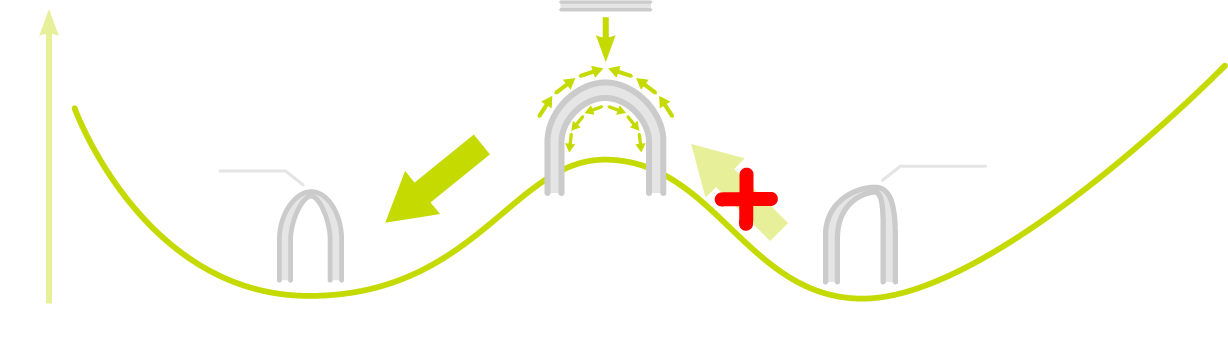
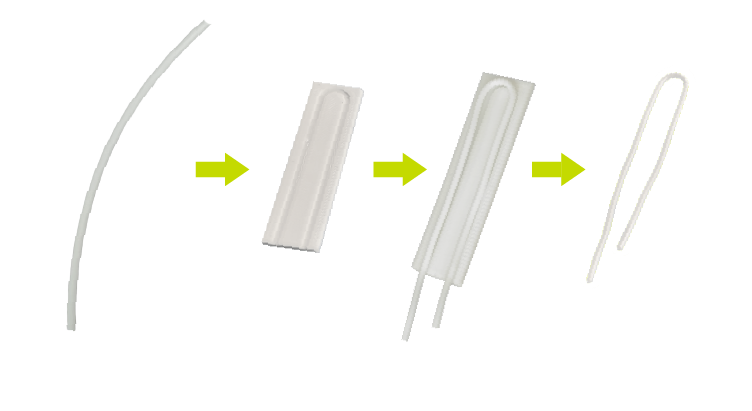
As a result, I tried to cast a U-shape tube to eliminate the stress of bending.
challenge - 1
It is difficult to 3d print the inner U-shape mold accurately because its rounded-shape and its size is relatively small.
solution - 1
I directly used PLA filament to fabricate the inner mold.
challenge - 2
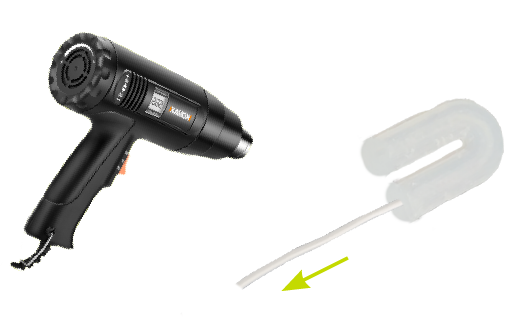
It was hard to remove inner mold after the silica gel cures because the inner mold is U-shaped.

solution - 2
I heated the inner mold to make it softer and easier to remove.
Here is the video of the fabrication process of the U-shape tube:
result
stable & reversible kink formation
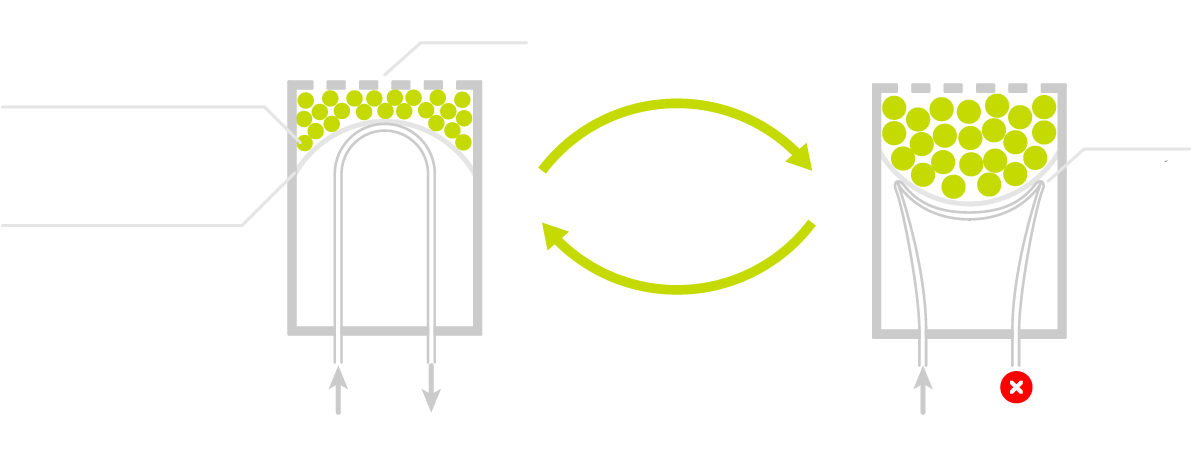
How to Trigger the Kink Valve?
I designed a monostable membrane to trigger formation of kink using swelling of gels.
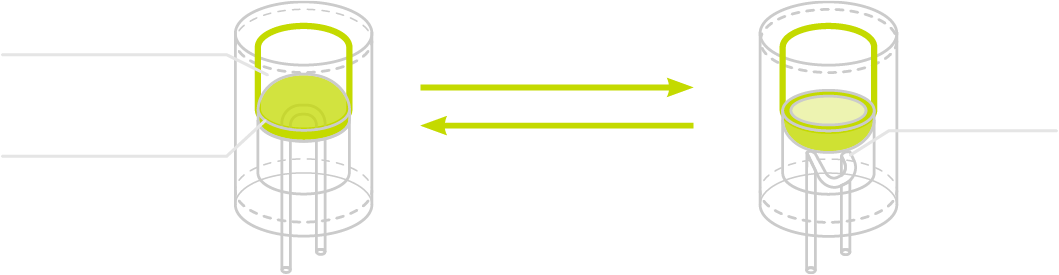
*monostable: after pushed down, the membrane can auto bounce back
Then I used a three-part-mold and silicon gel to cast this body.
Here is the video of the fabrication process of the membrane:
Next, I combined the kink with the membrane to test whether the valve works. However, I found the deformation of the monostable membrane cannot always trigger the kink valve.
challenge
cannot form kink stably

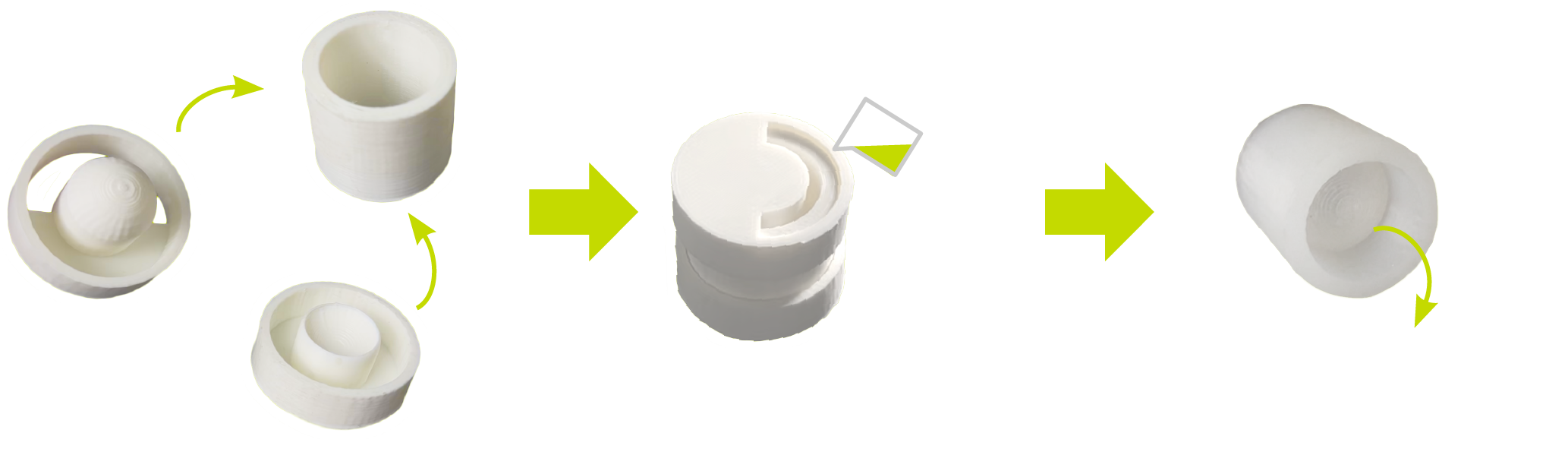
solution
make the tube head bigger & harder

To test whether this solution can work, I cast tube in 3 parts and stick them together.

result
After test, this kink structure cooperate better with the membrane.
Here is the video of the fabrication process of the new U-shape tube:
How to Enclose the Body of the Sensor?
The membrane enclosing the hydrogel chamber should be soft but not stretchable. Or the deformation of gels would be wasted in stretching it out.


As a result, in the fabrication process, I tried to embed the gauze into the top membrane to restrain its stretchability.
Here is the video of the fabrication process of the top membrane:
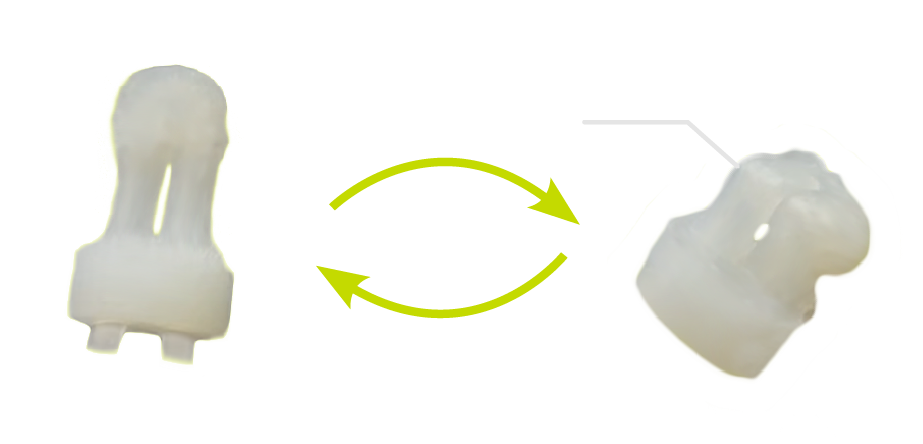
A Quick Wrap-up - Why Not?
I know it can get a little overwhelming on comprehending what have been done in the Structural Design part, so let's make it simple:
I designed the structure of the sensor, which uses two key structures (monostable membrane & U-shape tube) to "translate" the physical deformation of humidity-responsive materials into a logic signal (whether the "kink valve" forms).
Still complicated? Try it: when the humidity-responsive material swells, this structure will not allow air to pass through it; and when the material shrinks, it'll allow air to pass.
Pretty easy, uhm? And now, we need the right humidity-responsive material to trigger this structure...
MATERIAL DESIGN
Material Requirements?
After some mathematical calculations and experiments of the structure, the desirable hydrogel needs to meet the following two requirements.
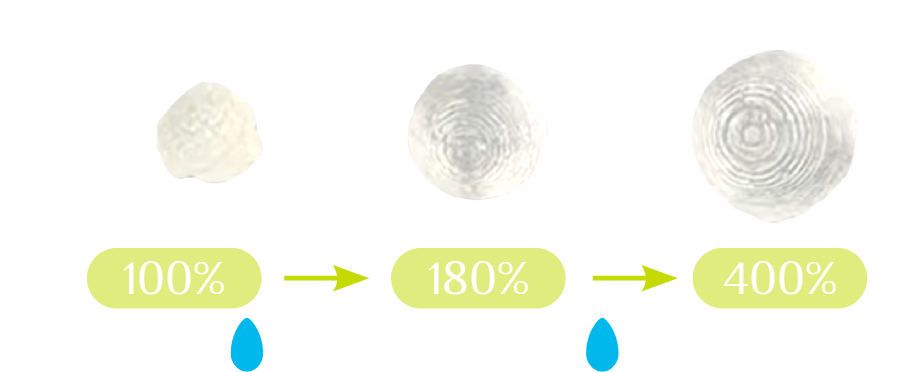
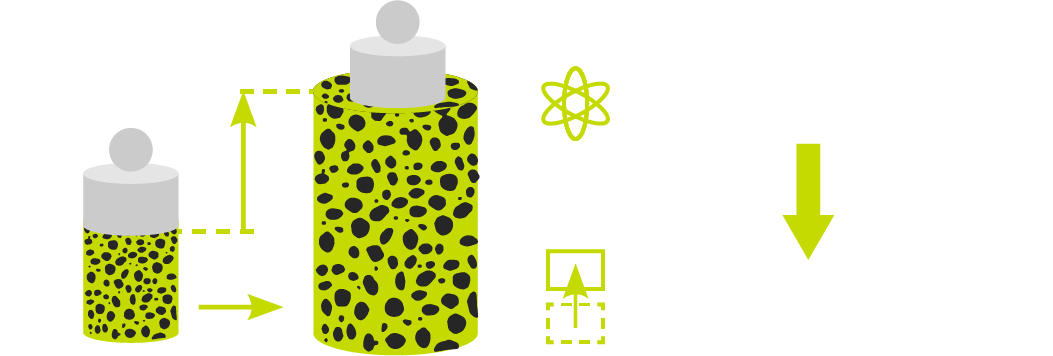
high swell ratio
a swell ratio of around 180%

mechanically robust
can withstand 5.1kPa pressure

How to Make Gel?
There are two ways to fabricate hydrogels, and I mainly experimented biopolymers, because they are easier to make and do not depend on expensive equipments.

To be more specific, I tested two common biopolymers to see their properties.
gelatin
gelatin - 10% 15% 20% 25% .etc

mechanically weak
κ-carrageenan
carrageenan - 2% 4% 6% 8% .etc

swell little
How to Make Gels Swell More & More Robust?
Hydrogels are known for good synergy effects: adding different gels together can produce interesting property enhancements. Based on the two common biopolymers above, I added locust bean gum and tapioca to meet these two requirements.

tapioca is usually used to increase the swell ratio of gel mixtures

tapioca is usually used to increase the swell ratio of gel mixtures
gelatin-based mixture
gelatin : locust bean gum - 4:1 3:1 2:1 1:1 .etc

swell little
gelatin : tapioca - 6:1 4:1 2:1 1:1 .etc

mechanically weak
κ-carrageenan-based mixture
carrageenan : locust bean gum - 4:1 3:1 2:1 1:1 .etc

swell little
carrageenan : tapioca - 4:1 2:1 1:1 1:2 .etc

swell much & mechanically robust, but swell slow
material result
6% κ-carrageenan : 1.5% tapioca meets the two desired material requirements, but it swells slowly.
challenge - 1
The gel swells slowly.

solution - 1
Cast the gel into spherical shapes to achieve a larger absorb surface.
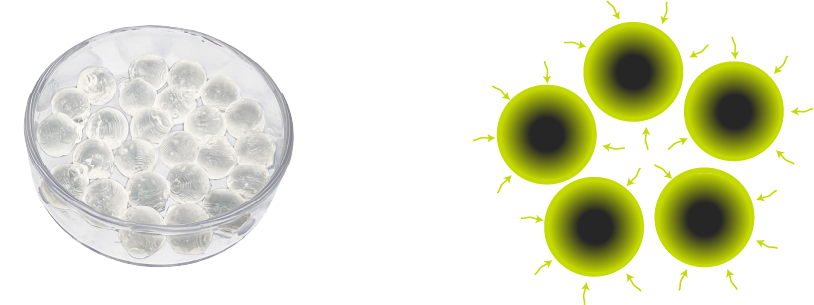
challenge - 2
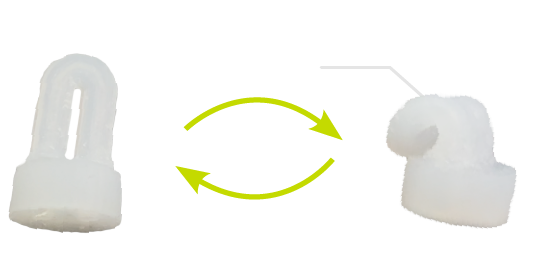
After casting, the hydrogel is in a hydrated state and needs to be further dehydrated to swell more.
I tried to let the gel dry out naturally or accelerate the process by heating. But the gel will irreversibly collapse in days ⬇️.

solution - 2
Inspired by this work[12], I immersed the gel in glycerin to dehydrate. It turned out that the gel can reach a stable dry-out state.
Embedded test
The valve can close in 30min, with a breakthrough pressure of 54kPa.
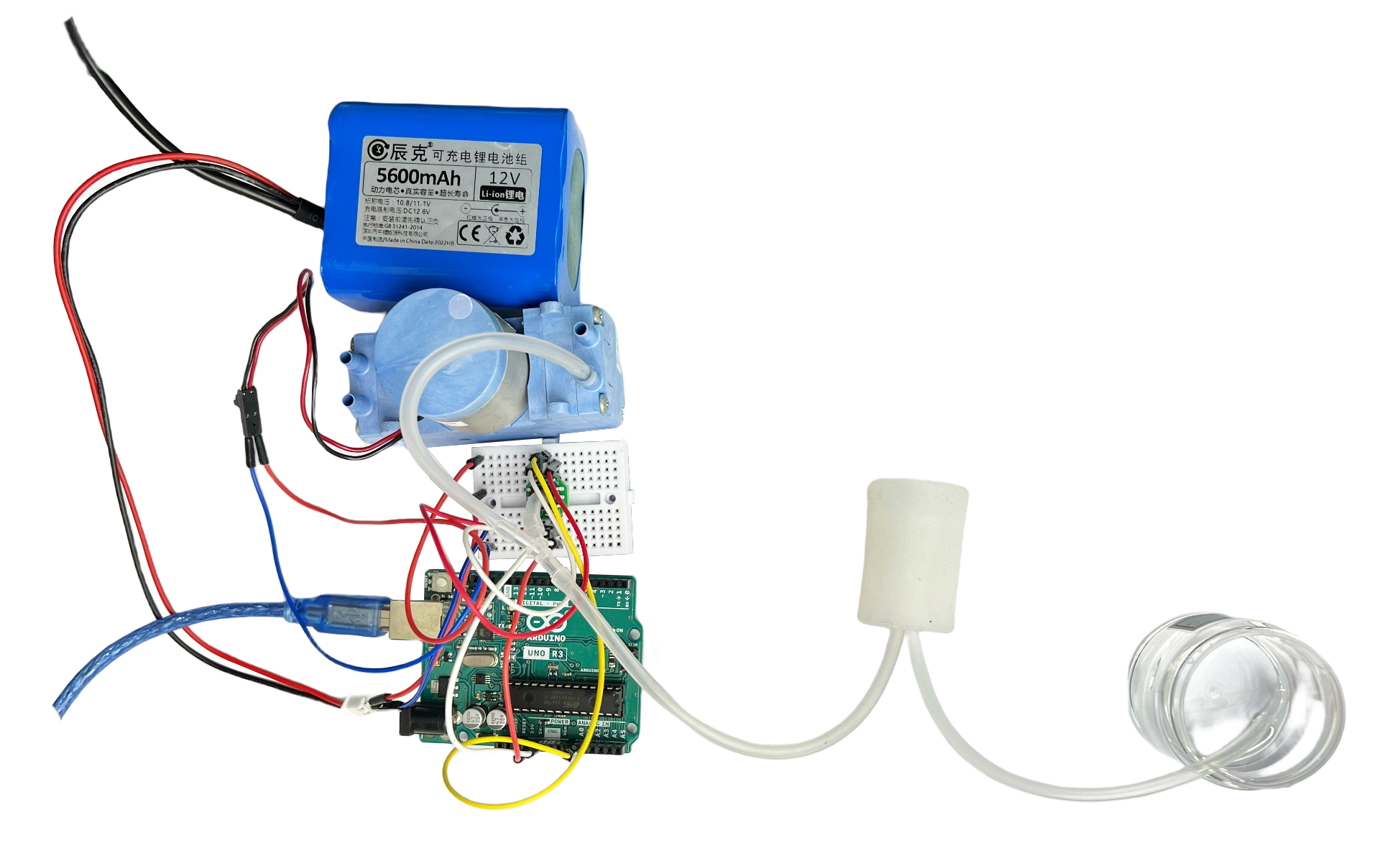
Here is the video of the fabrication process of the hydrogel material and the embedded-test:
Limitations & Solutions
swelling speed
To make the gel swell faster and to a greater extent, I optimized aspects in terms of materials (κ-carrageenan & tapioca) and structures (sphere balls). However, the gel still swells quite slowly (30min).
On the other hand, researchers have proposed ways to fabricate fast-swelling hydrogels using synthetic polymers. [13]

Research reports a porous, robust, and fast-swelling hydrogel material, which fits all requirements (swell ratio & mechanically robust), but I failed to replicate it due to its complicated fabrication of synthetic polymers. [13]
Nevertheless, it is clear that such material is realizable.
deswelling speed
The gel's deswelling speed is even slower and would take hours to fully dry. However, this speed is limited by the gel-swelling dynamics. Therefore it is hard to make alternations to the material itself to enable it deswell faster. [14]

However, researches still find ways of triggerable deswelling: adding chemicals, changing PH, heating, etc. [13]
One possible solution: soft polyimide heat film can be embedded to accelerate deswelling ➡️.

INNOVATIONS
➊ There are few researches on physical intelligent soft humidity sensors that receive energy from the environment.
❷ Traditionally, responsive materials are directly used to actuate, leading to limited mechanical properties.

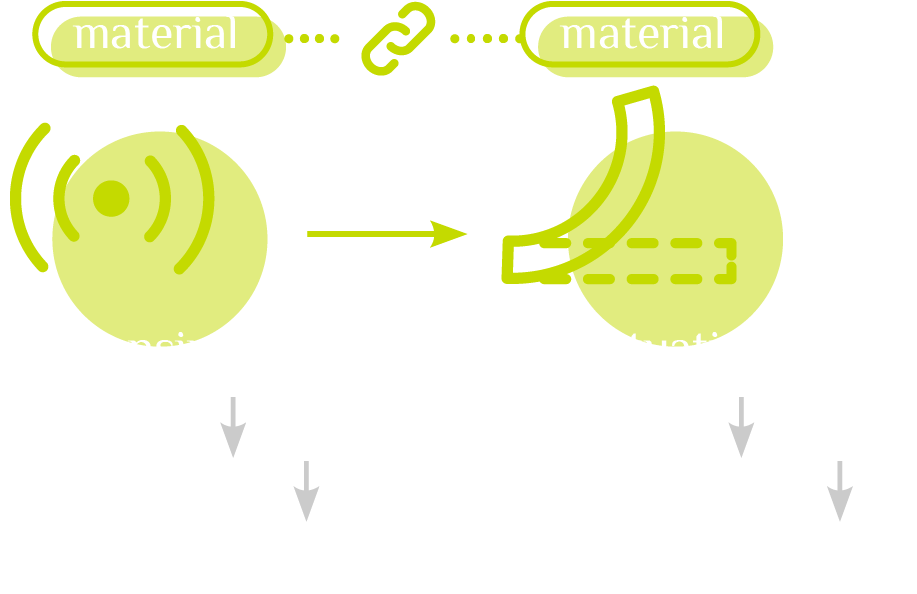
However, MoistValve explores a new diagram of the responsive shape-changing interface: it decouples the sensing and actuating part.

This is because MoistValve uses the small deformation of hydrogels to control pneumatic terminals with better actuation abilities.
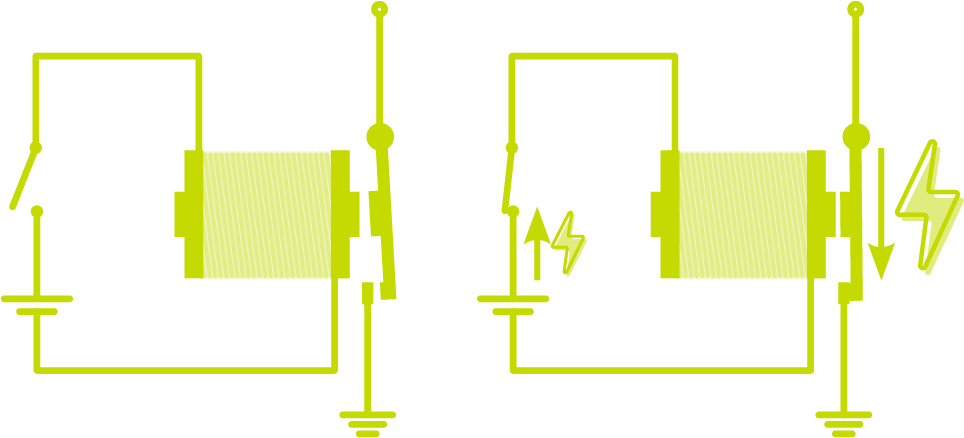
an analogy is the relay: it uses a small current to control a larger current.
APPLICATIONS
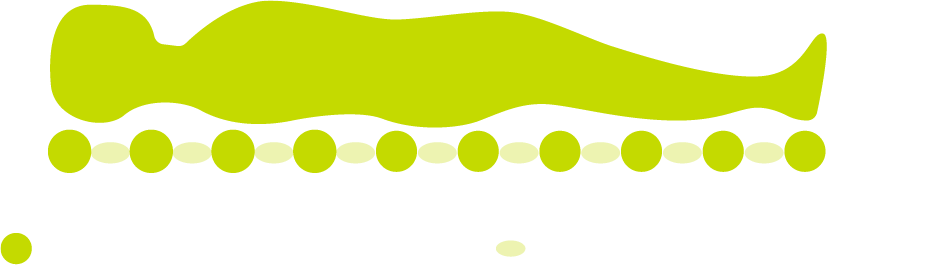
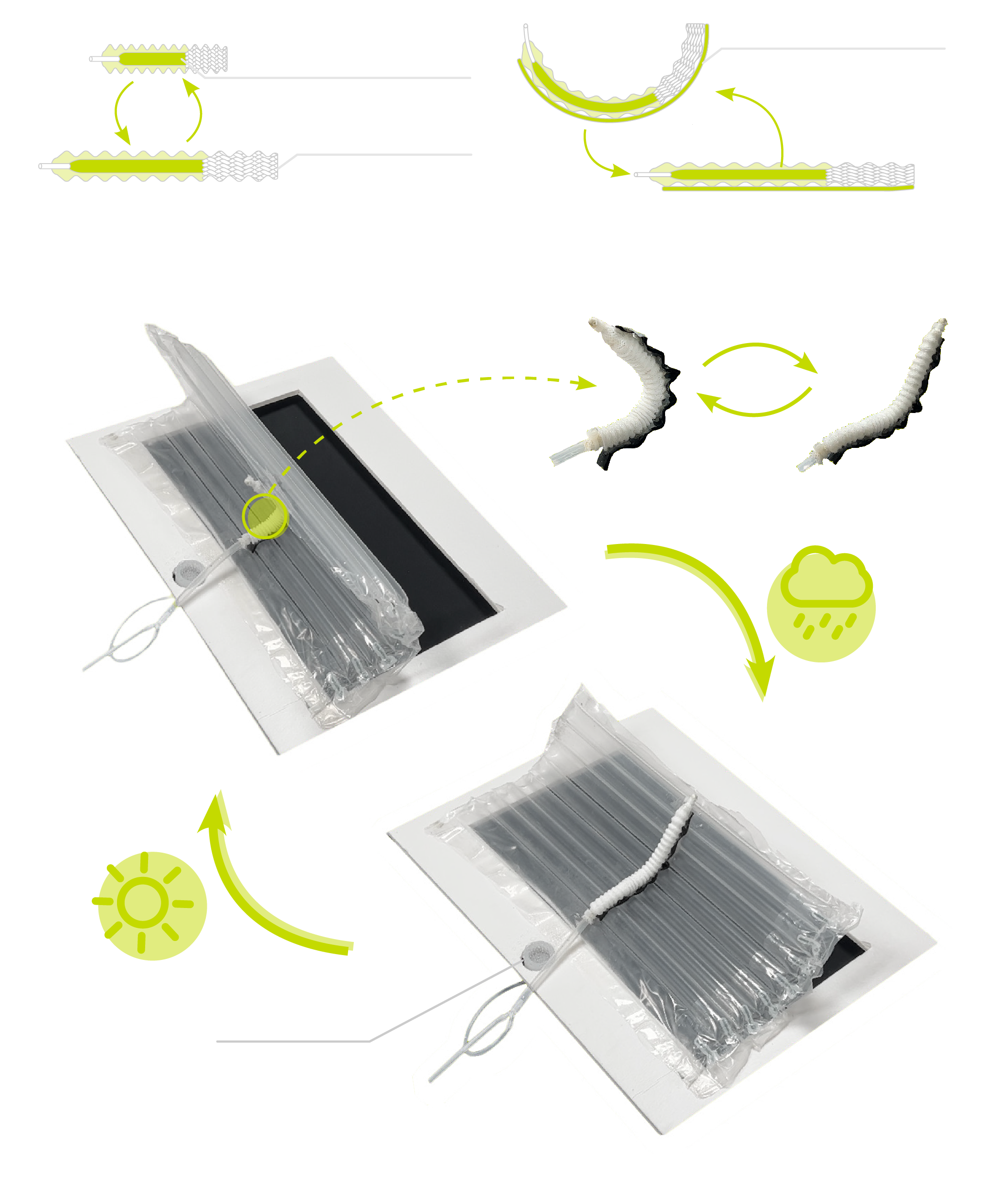
Pressure Ulcer Prevention Mattress
background
Pressure ulcers (PU) are injuries to the skin and underlying tissue caused by prolonged pressure to the skin. Deformation is the main cause of PU. Moisture, however, can accelerate PU formation. [15]

current solutions
Current PU preventing mattresses use alternate inflation and deflation to redistribute pressure. However, most of them cannot respond to moisture. This is because current humidity sensors are big and rigid, thus can damage the skin.
ergonomic analysis
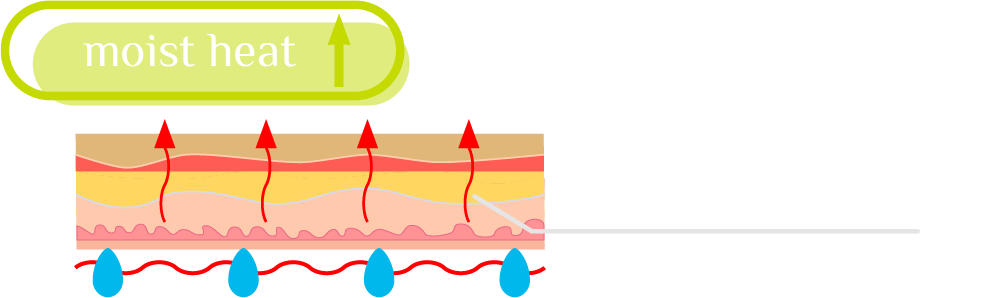
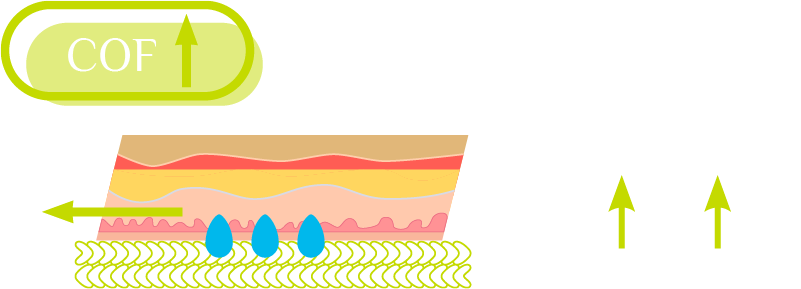
Humidity makes the skin PU-prone by following two aspects.
Higher COF (μ) will lead to higher friction force (shear) to skin.
Humidity makes skin PU-prone due to higher tissue temperature.
solution with the MoistValve
I want to use MoistValve to sense humidity and redistribute pressure out of places with high humidity degree.

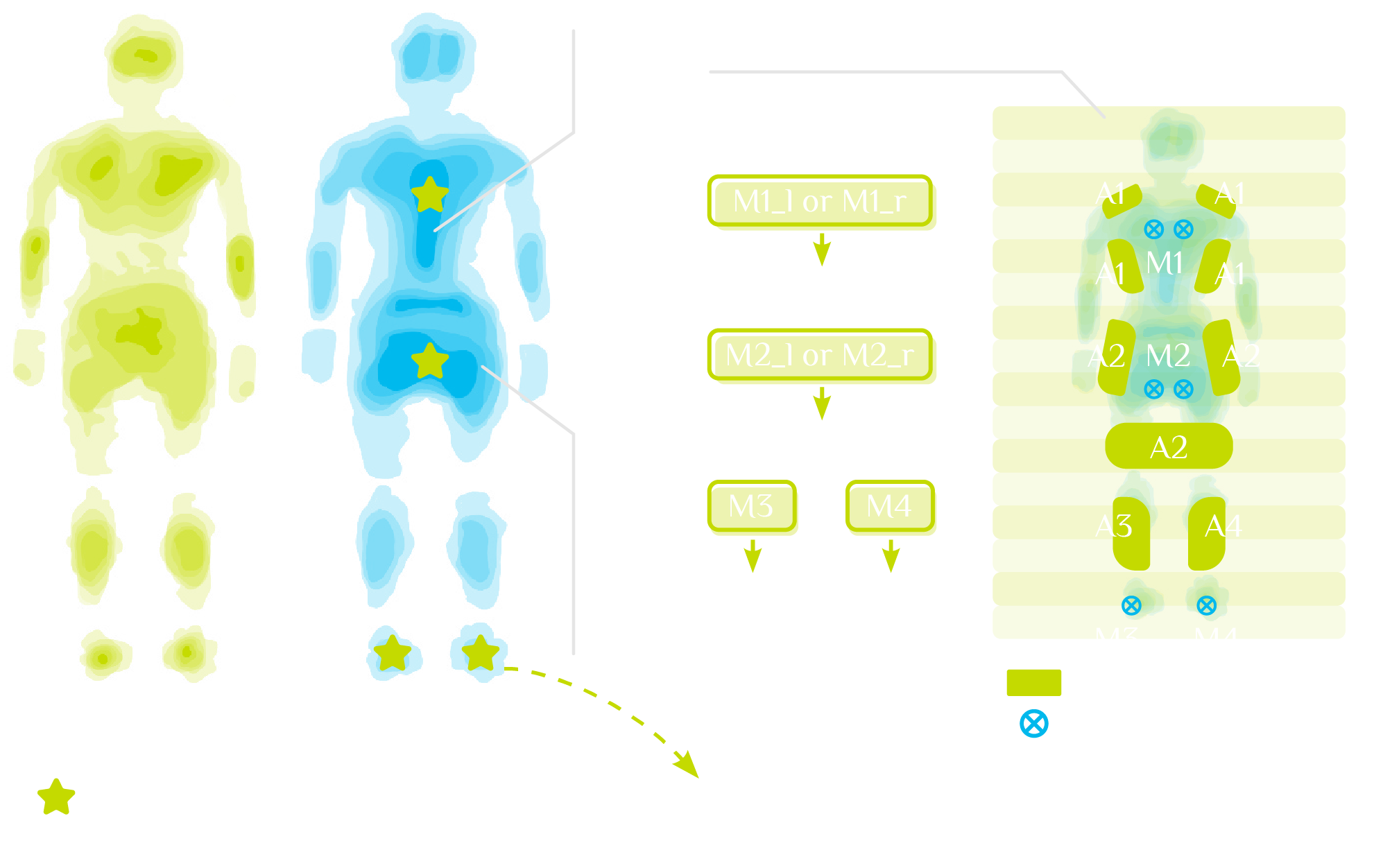
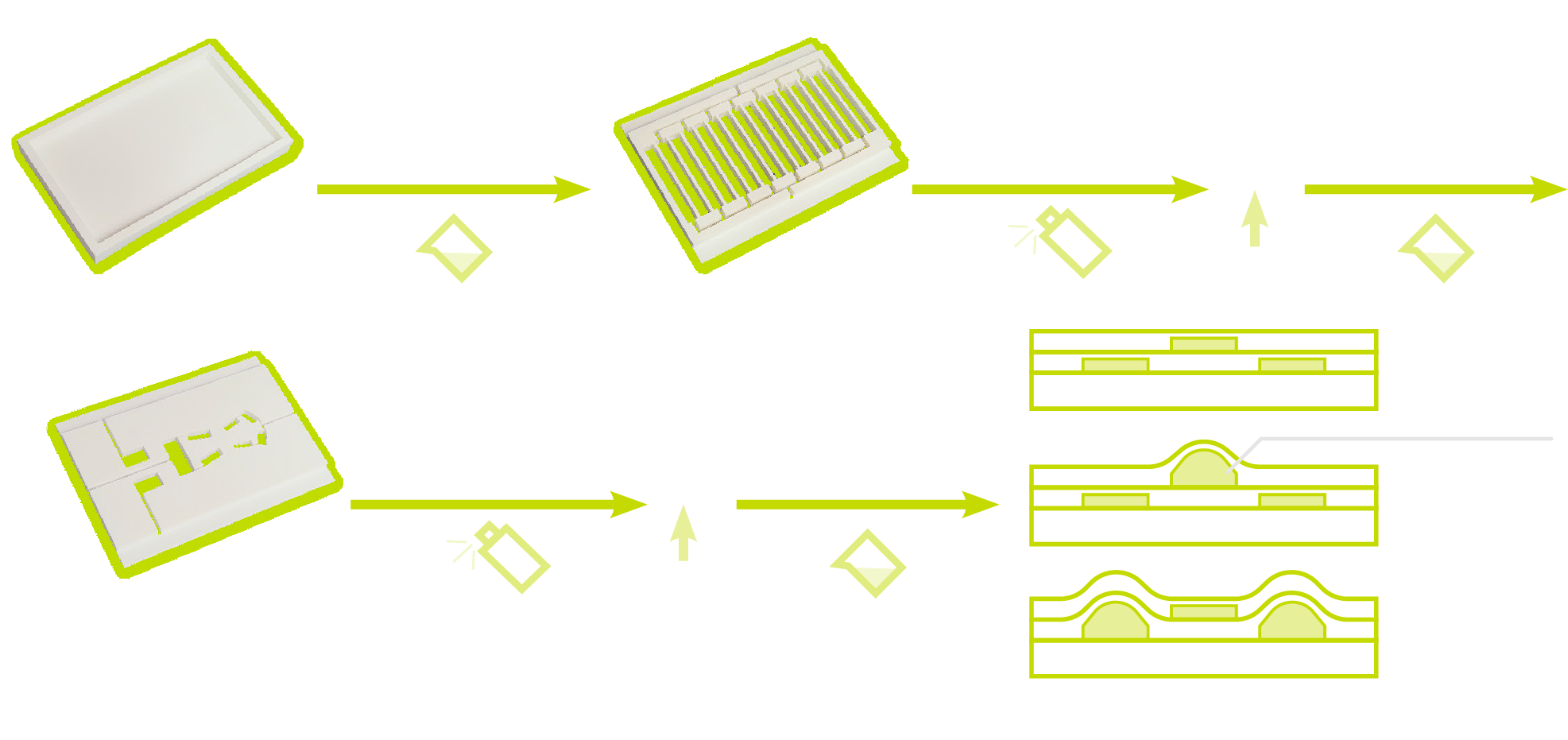
I wanted to embed humidity-responsive air chambers and traditional alternative chambers together in one mattress. As a result, I fabricated a multi-layered mattress structure.
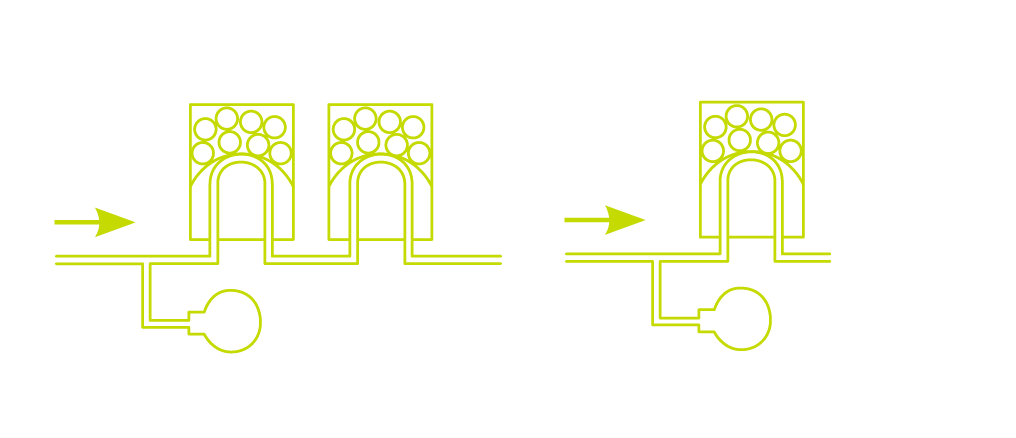
Moreover, some basic logic can be realized by the MoistValve.

Smart Louver
The MoistValve can also be used to design smart exterior surfaces of buildings, such as smart louvers that can automatically close when raining.
To actuate the movement of flower's stem, I used a variant of a Mckibben muscle ⬇️.
Flower Watering Toy Blocks
I also used the MoistValve to design toy blocks that can sense the watering action and actuate the movement of pneumatic flowers.
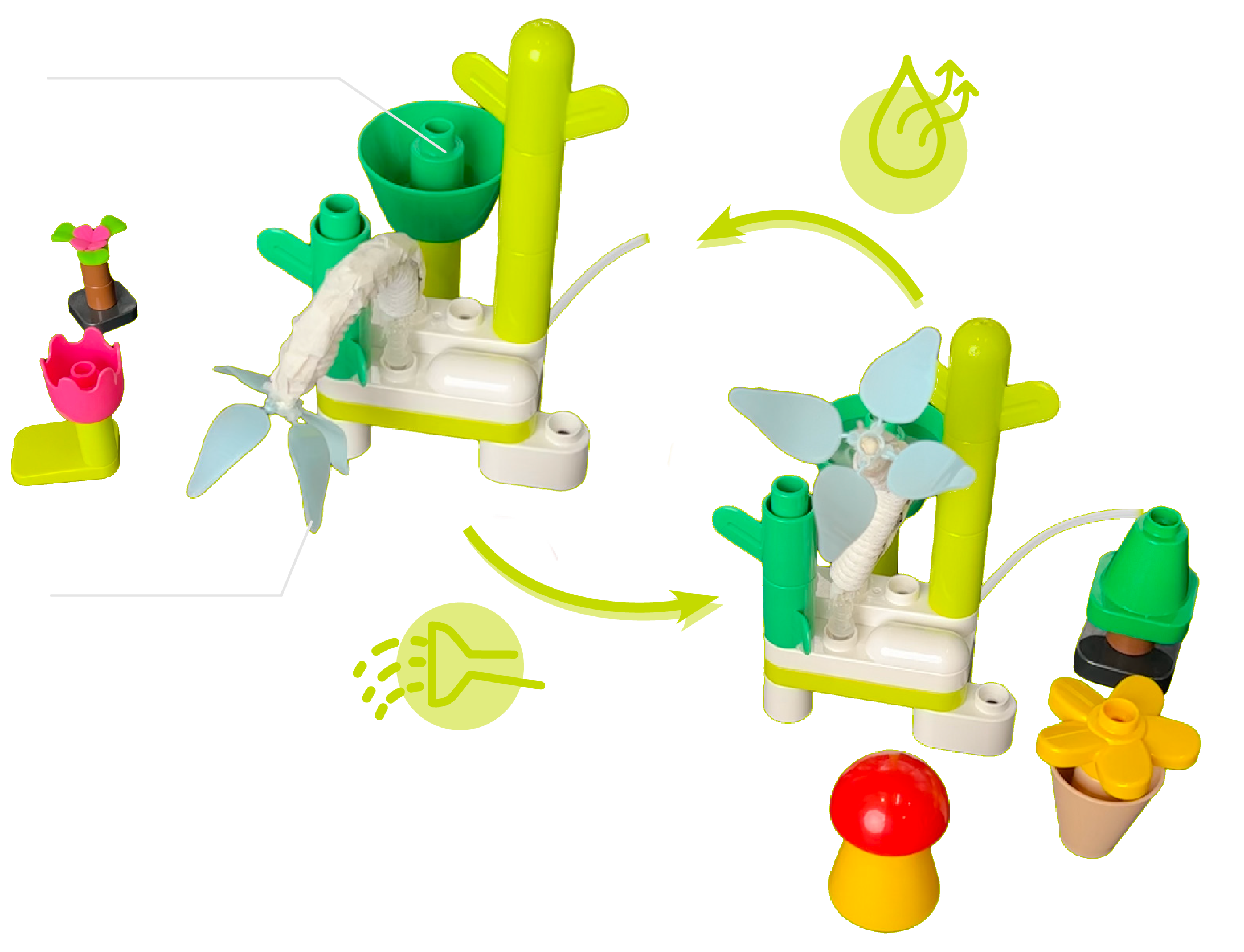
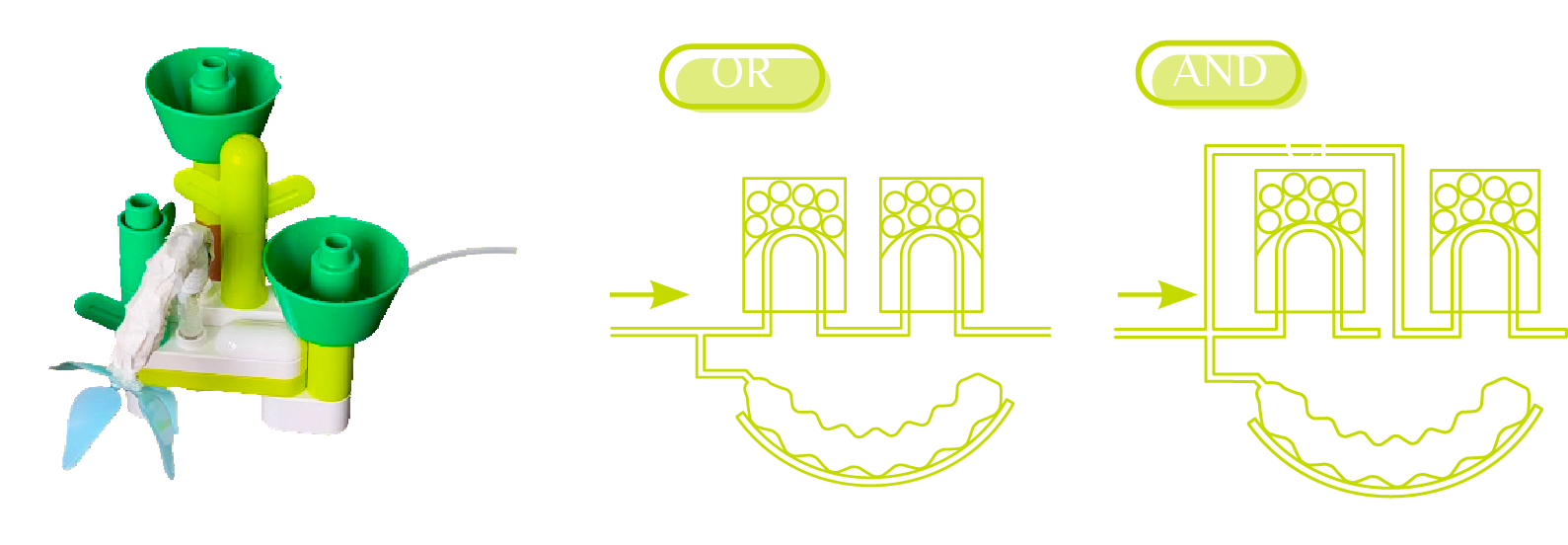
There can also be multiple water-adding cups, to realize some basic logic.
FUTURE WORK
One major future work is fabricating fast-responsive and mechanically robust hydrogel and embedding it in the MoistValve for evaluation.
Besides, the shape-changing materials can not only respond to humidity, but temperature, PH, light, etc. I will further explore all these potentials.
REFERENCES
[1] Xu, S. et al. (2018) “Biocompatible Soft Fluidic Strain and force sensors for wearable devices,” Advanced Functional Materials, 29(7), p. 1807058. Available at: https://doi.org/10.1002/adfm.201807058.
[2] Sitti, M. (2021) “Physical Intelligence as a new paradigm,” Extreme Mechanics Letters, 46, p. 101340. Available at: https://doi.org/10.1016/j.eml.2021.101340.
[3] van Laake, L.C. et al. (2022) “A fluidic relaxation oscillator for reprogrammable sequential actuation in soft robots,” Matter, 5(9), pp. 2898–2917. Available at: https://doi.org/10.1016/j.matt.2022.06.002.
[4] Zhao, Y. et al. (2022) “Twisting for soft intelligent autonomous robot in unstructured environments,” Proceedings of the National Academy of Sciences, 119(22). Available at: https://doi.org/10.1073/pnas.2200265119.
[5] Wang, W. et al. (2017) “Harnessing the hygroscopic and biofluorescent behaviors of genetically tractable microbial cells to design biohybrid wearables,” Science Advances, 3(5). Available at: https://doi.org/10.1126/sciadv.1601984.
[6] Correa, D. et al. (2015) “3D-printed wood: Programming hygroscopic material transformations,” 3D Printing and Additive Manufacturing, 2(3), pp. 106–116. Available at: https://doi.org/10.1089/3dp.2015.0022.
[7] Rivera, M.L. et al. (2020) “Hydrogel-Textile Composites,” Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems [Preprint]. Available at: https://doi.org/10.1145/3334480.3382788.
[8] Bakarich, S.E. et al. (2015) “3D/4D Printing Hydrogel Composites: A pathway to functional devices,” MRS Advances, 1(8), pp. 521–526. Available at: https://doi.org/10.1557/adv.2015.9.
[9] Czugala, M. et al. (2011) “Materials science: The key to revolutionary breakthroughs in micro-fluidic devices,” SPIE Proceedings [Preprint]. Available at: https://doi.org/10.1117/12.895330.
[10] Yu, Q. et al. (2001) “Responsive biomimetic hydrogel valve for Microfluidics,” Applied Physics Letters, 78(17), pp. 2589–2591. Available at: https://doi.org/10.1063/1.1367010.
[11] Luo, K. et al. (2019) “Soft kink valves,” Journal of the Mechanics and Physics of Solids, 131, pp. 230–239. Available at: https://doi.org/10.1016/j.jmps.2019.07.008.
[12] Sason, G. and Nussinovitch, A. (2018) “Characterization of κ-carrageenan gels immersed in ethanol solutions,” Food Hydrocolloids, 79, pp. 136–144. Available at: https://doi.org/10.1016/j.foodhyd.2017.12.025.
[13] Choudhary, H. and Raghavan, S.R. (2022) “Superfast-expanding porous hydrogels: Pushing new frontiers in converting chemical potential into useful mechanical work,” ACS Applied Materials & Interfaces, 14(11), pp. 13733–13742. Available at: https://doi.org/10.1021/acsami.2c00645.
[14] Bertrand, T. et al. (2016) “Dynamics of swelling and drying in a spherical gel,” Physical Review Applied, 6(6). Available at: https://doi.org/10.1103/physrevapplied.6.064010.
[15] Kottner, J. et al. (2018) “Microclimate: A critical review in the context of pressure ulcer prevention,” Clinical Biomechanics, 59, pp. 62–70. Available at: https://doi.org/10.1016/j.clinbiomech.2018.09.010.